Alexander, D. (2006) Linking an HTN Planner to a Universal Robot Controller for High-Level Activity Control, Master of Science Dissertation, Edinburgh University, Edinburgh, Scotland, September, 2006.Abstract:
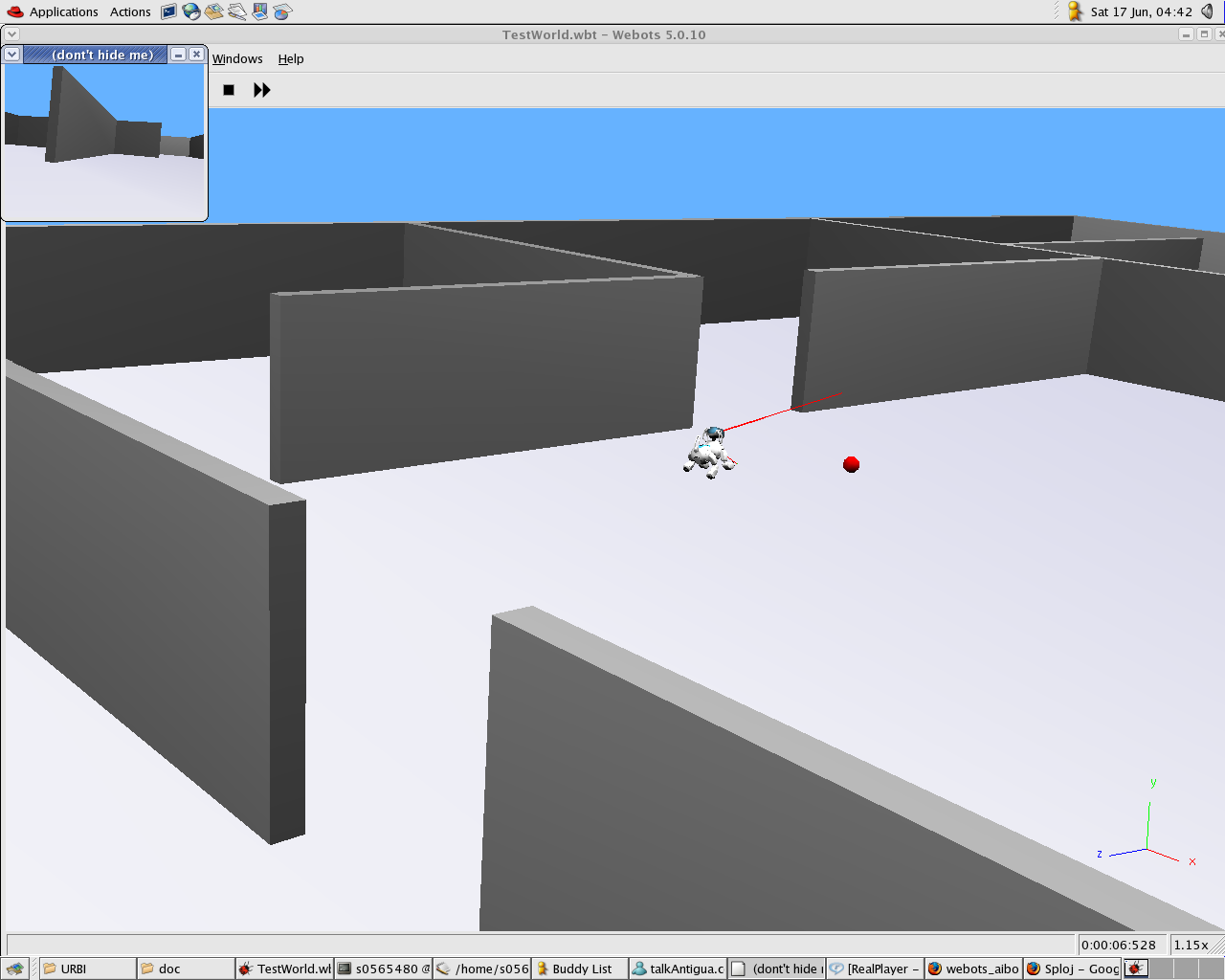
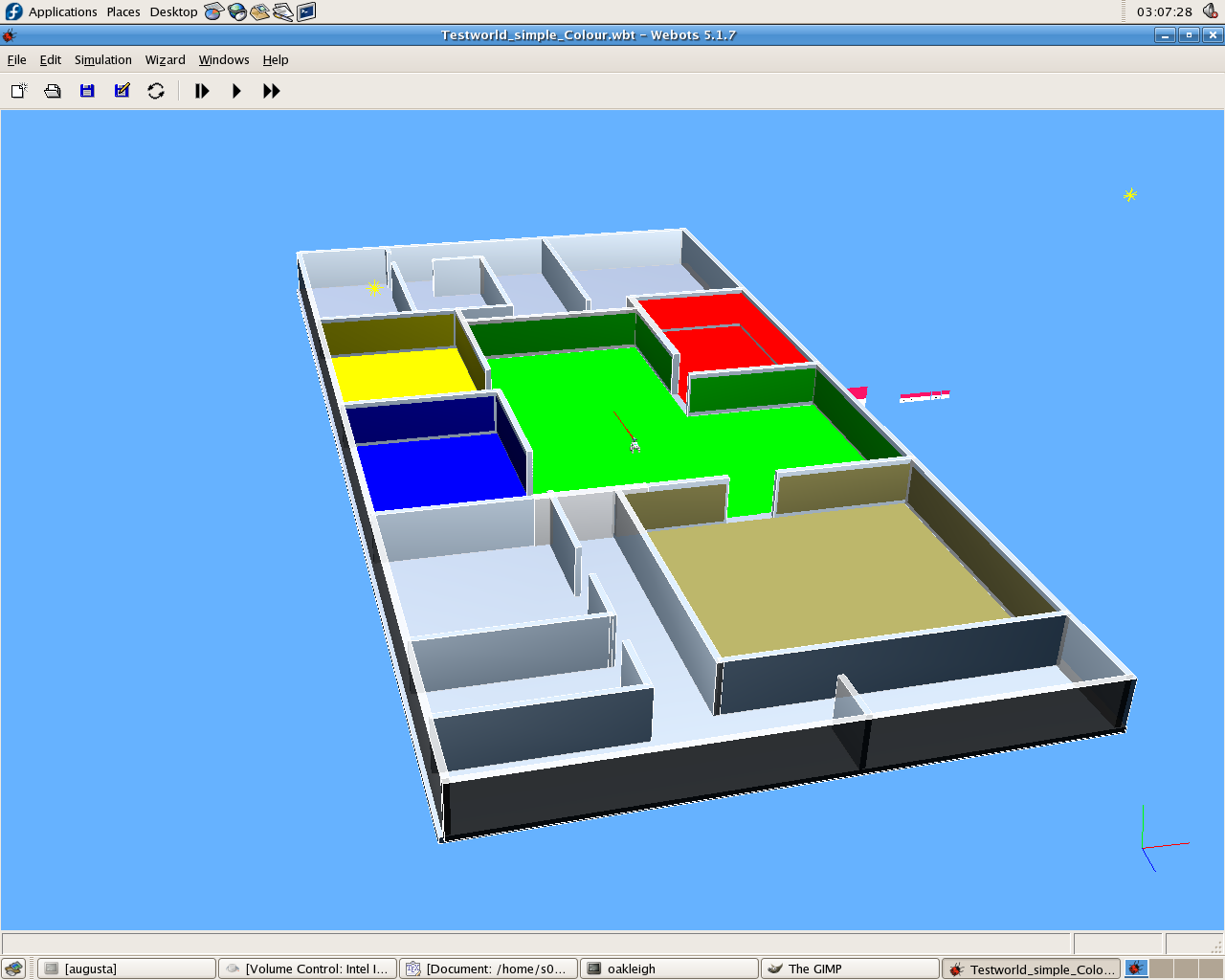
In this thesis we investigated the possibilities for developing a generic high-level robot controller, using an architecture consisting of a HTN planner (provided by the I-X framework) generating and sending actions to a robot via a generic controller (provided by URBI) in order to perform some complex task that could not be executed by the robot directly. The complex task that was chosen was to have our robot navigate from one zone to another in a generic office environment, with zones representing rooms and open spaces.Images:In order to implement a generic controller we first focused on identifying the robot's capabilities as represented by the commands that URBI provides. We modelled these commands in such a way that I-X would be able to reason about and create plans from them. This resulted in a library of primitive I-X actions implemented in the I-X LISP notation such that there existed a one to one mapping to URBI commands. These actions then provide a foundation for building higher-level methods & tasks. The communication and monitoring of commands is handled by the robot controller that was designed and implemented in this project. It was also the job of this controller to update I-X's knowledge of the state of the world.
This system gave us the opportunity to evaluate the approach, by doing some limited experiments involving the generation of plans in I-X and executing them on a particular simulated robot in environments that were tailored specifically for a complex task.
Our first hypothesis was that I-X and URBI together can provide a generic high-level controller for robots. However, from the results of the experiments and general considerations of I-X and URBI as components in this architecture, the system built during this project provided evidence only for a weaker hypothesis, namely that I-X and URBI together provide a high-level controller for a specific robot in a specific environment.